
The pendulum equation is x'' + c x' + k^2 sin x = 0, with k^2 = g/L. The constant c is a measure of the amount of friction or air resistance. We convert this to a system by setting y = x', so y' = x''. Then the equation becomes
If we multiply the equation by x', it becomes

The quantity
is called the energy.
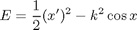
If there is no friction (i.e., c = 0), then dE/dt = 0, i.e., energy is conserved. Thus the trajectories lie along the level curves of E. Let's plot them for k = 1.
[xx, yy] = meshgrid((-.5:0.05:4.5)*pi, -3:0.05:3); E = .5*yy.^2 - cos(xx); contour(xx, yy, E) axis equal axis([0, 4*pi, -3, 3]) set(gca, 'XTick', (0:4)*pi) set(gca, 'XTickLabel', {'0', 'pi', '2pi', '3pi', '4pi'})

Let's assume there is a small amount of friction, say c = 0.1. The critical points still lie at (n*pi, 0), n an integer. Let's compute the eigenvalues of the linearized system at (0, 0) and (pi, 0).
A1 = [0, 1; -1, -0.1] eig(A1)
A1 =
0 1.0000
-1.0000 -0.1000
ans =
-0.0500 + 0.9987i
-0.0500 - 0.9987i
This is a stable spiral point.
A2 = [0, 1; 1, -0.1] eig(A2)
A2 =
0 1.0000
1.0000 -0.1000
ans =
0.9512
-1.0512
This is an unstable saddle point. Now let's plot some trajectories in the phase plane with ode45. The pictures show up best if we plot different trajectories in different colors.
colors = 'rgbyc'; rhs = @(t, x) [x(2); -0.1*x(2) - sin(x(1))]; options= odeset('RelTol', 1e-7); for y0 = 0:15 [t, x] = ode45(rhs, [0, 25], [0; 0.2*y0], options); plot(x(:,1), x(:, 2), colors(mod(y0,5)+1)) hold on end plot([0,0],[-3,3],'k:',[4*pi,4*pi],[-3,3],'k:') axis equal axis([-pi/2, 4.5*pi, -3, 3]) xlabel 'x' ylabel 'y' set(gca, 'XTick', (0:4)*pi) set(gca, 'XTickLabel', {'0', 'pi', '2pi', '3pi', '4pi'})
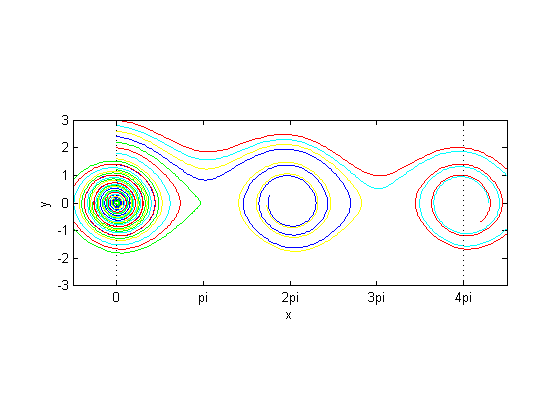
Now let's superimpose the contours of constant energy. Since the time derivative of energy is always non-positive, the trajectories most always be moving to states of lower energy.
contour(xx, yy, E)
hold off
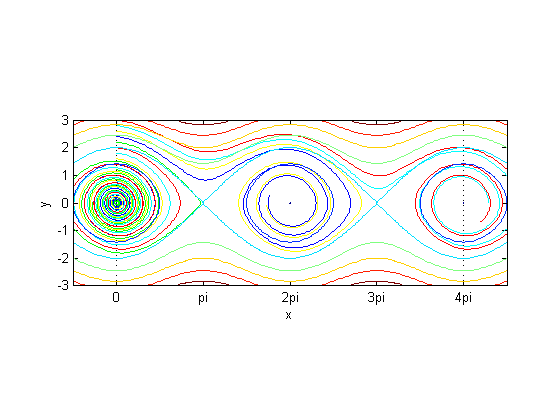
We can not only look at the phase plots but also at how x and y = dx/dt vary with time for the initial conditions we've chosen. Here are some pictures:
figure, hold on for y0 = 0:0.2:3 [t, x] = ode45(rhs, [0, 25], [0; y0], options); subplot(2, 1, 1), hold on plot(t, x(:,1)) subplot(2, 1, 2), hold on plot(t, x(:, 2)) hold on end subplot(2, 1, 1) xlabel t ylabel 'x = angle' set(gca, 'YTick', (0:4)*pi) set(gca, 'YTickLabel', {'0', 'pi', '2pi', '3pi', '4pi'}) subplot(2, 1, 2) xlabel t ylabel 'y = angular velocity'
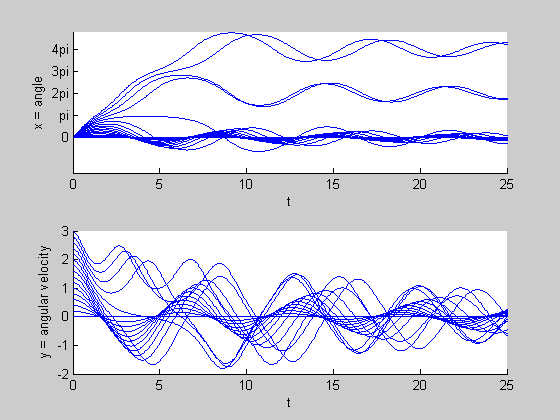
Note that the pictures confirm that as t goes to infinity, x tends to a multiple of 2pi and y tends to 0.