Curve fitting example 2
Contents
find acceleration: fit data with quadratic function y = c1*1 + c2*t + c3*t^2
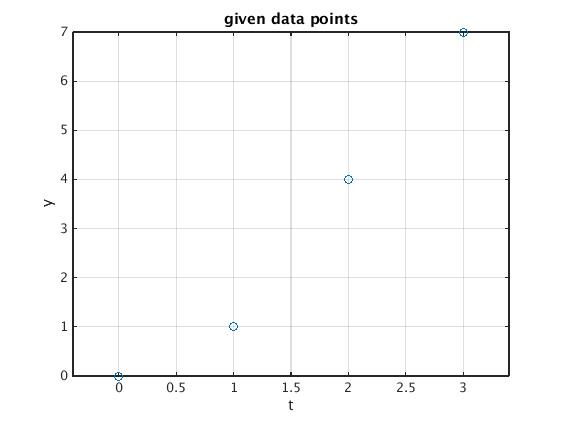
We assume a car is driving with constant acceleration. In order to find the acceleration we measure the position y at four t-values.
% given data: t = [0;1;2;3]; % t-values y = [0;1;4;7]; % y-values data = [t,y] % table of given t and y values plot(t,y,'o') % plot given data points xlabel('t');ylabel('y') grid on; xlim([-.4,3.4]); title('given data points') A = [t.^0,t,t.^2] % matrix A
data =
0 0
1 1
2 4
3 7
A =
1 0 0
1 1 1
1 2 4
1 3 9
Solve normal equations
The normal equations are a 3 by 3 linear system.
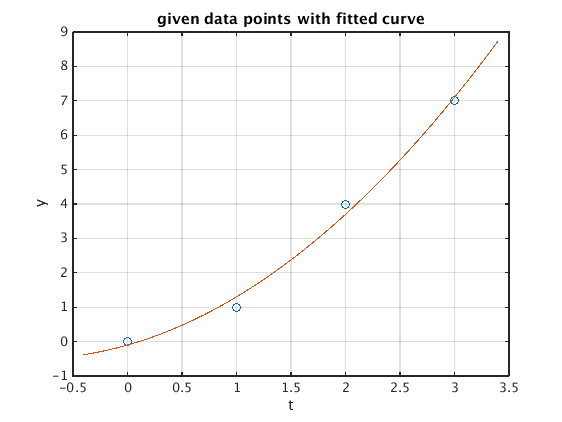
Result: The best least squares fit is y = -0.1 + 0.9*t + 0.5*t^2, so the estimated acceleration is 2*c3 = 1.
M = A'*A g = A'*y c = M\g tp = (-0.4:.1:3.4)'; % t-values for plotting curve yp = [tp.^0,tp,tp.^2]*c; % y-values for fitted curve plot(t,y,'o',tp,yp) % plot data points together with fitted curve xlabel('t');ylabel('y') grid on; title('given data points with fitted curve')
M =
4 6 14
6 14 36
14 36 98
g =
12
30
80
c =
-0.1000
0.9000
0.5000
Check residual vector
Find the norm of the residual vector r. Check that r is really orthogonal on the columns of the matrix A.
r = A*c - y % residual vector norm_r = norm(r) % norm A'*r % dot product of columns of A with r % gives zero, up to roundoff error from machine accuracy
r =
-0.1000
0.3000
-0.3000
0.1000
norm_r =
0.4472
ans =
1.0e-14 *
0.0444
0.1776
0.1776