Contents
Transforms, especially the Laplace Transform
% In this lecture we shall study the concept of a transform % and then specialize to the Laplace Transform. Suppose you % have some collection of objects on which there are well % defined operations. For example: % **The set of all right triangles with various geometric % and algebraic operations; or % **The set of Riemann Integrable functions on the % interval [-pi,pi] with various analytic operations; or % **The set of piecewise continuous functions on the % positive x-axis with no more than exponential growth and % the operation of differentiation. % You will recognize from the text (B&DiP, Ch 6) the last % example as the set of functions for which we can take a % Laplace Transform. We'll come back to that, but first % let's consider the first two examples to get a % feel for what a transform can do to help us solve concrete % problems.
Right Triangles
% Given a right triangle, we shall associate with it a pair % of real numbers in the set % {(x, y): 0 < x <= y} % by assigning x to be the length of the shortest leg and % y to be the length of the other leg. % Now certain operations on the set of right triangles can % be converted into operations on the pair of real numbers. % For example, the operation of shrinking the size of each % side of the triangle by the same amount, say lambda < 1, % amounts to multiplying the coordinates (x, y) by lambda. % Similarly with an expansion lambda > 1. One could also % shrink or expand the two sides independently and that % would correspond to multiplying the coordinates by % distinct numbers. (One would have to restrict the % multipliers to ensure that the multiple of x is less than % the multiple of y.) % Here is something more subtle. Given a % right triangle, how do you obtain a new triangle in which % the length of the shortest leg remains the same but the % size of the angle between the shortest leg and the % hypotenuse is three quarters its original size. How much % shorter does the longer leg have to be? Well if theta is % the angle in question, then first of all it needs to be % greater than pi/4 radians in order for x to be the % shorter side. And if it remains the shorter side in the new % triangle, then (3/4)theta must also be greater than pi/4. % So it must be that theta > pi/3. Now we multiply y % by lambda. Then the geometric problem is transformed % into the agebriac problem: % theta = arctan(y/x). % Find lambda < 1 so that % (3/4) arctan(y/x) = arctan(lambda*y/x). % Not an easy problem by hand, but easy for Matlab. clear all close all
To illustrate, suppose x = 1 and y = 3. Then
x = 1; y = 3; theta = atan(y/x) lambda = x * tan((3/4)*theta)/y % So you have to shorten the longer leg by a factor of 0.4533. % in order to reduce the angle by 25%.
theta =
1.2490
lambda =
0.4533
Here's a harder problem. Find all the right triangles whose perimeter equals its area? After applying the transform, that is, converting the triangle into a pair of real numbers, the problem becomes: solve the equation (1/2)xy = x + y + sqrt(x^2 + y^2).
% That is some kind of quadratic curve. % Let's see whether Matlab can simplify the equation clear all syms x y; simplify(((1/2)*x*y - (x+y))^2 - (x^2+y^2))
ans = -(x*y*(4*x + 4*y - x*y - 8))/4
Since x and y are both non-zero, the equation further simplifies to 4*x + 4*y - x*y - 8 = 0.
% That is actually a hyperbola as you can see by making the % substitution % x = u + v, y = u - v. syms u v; expr = 4*x + 4*y - x*y - 8; subs(expr, [x y], [u+v u-v]) expand(ans)
ans = 8*u - (u + v)*(u - v) - 8 ans = - u^2 + 8*u + v^2 - 8
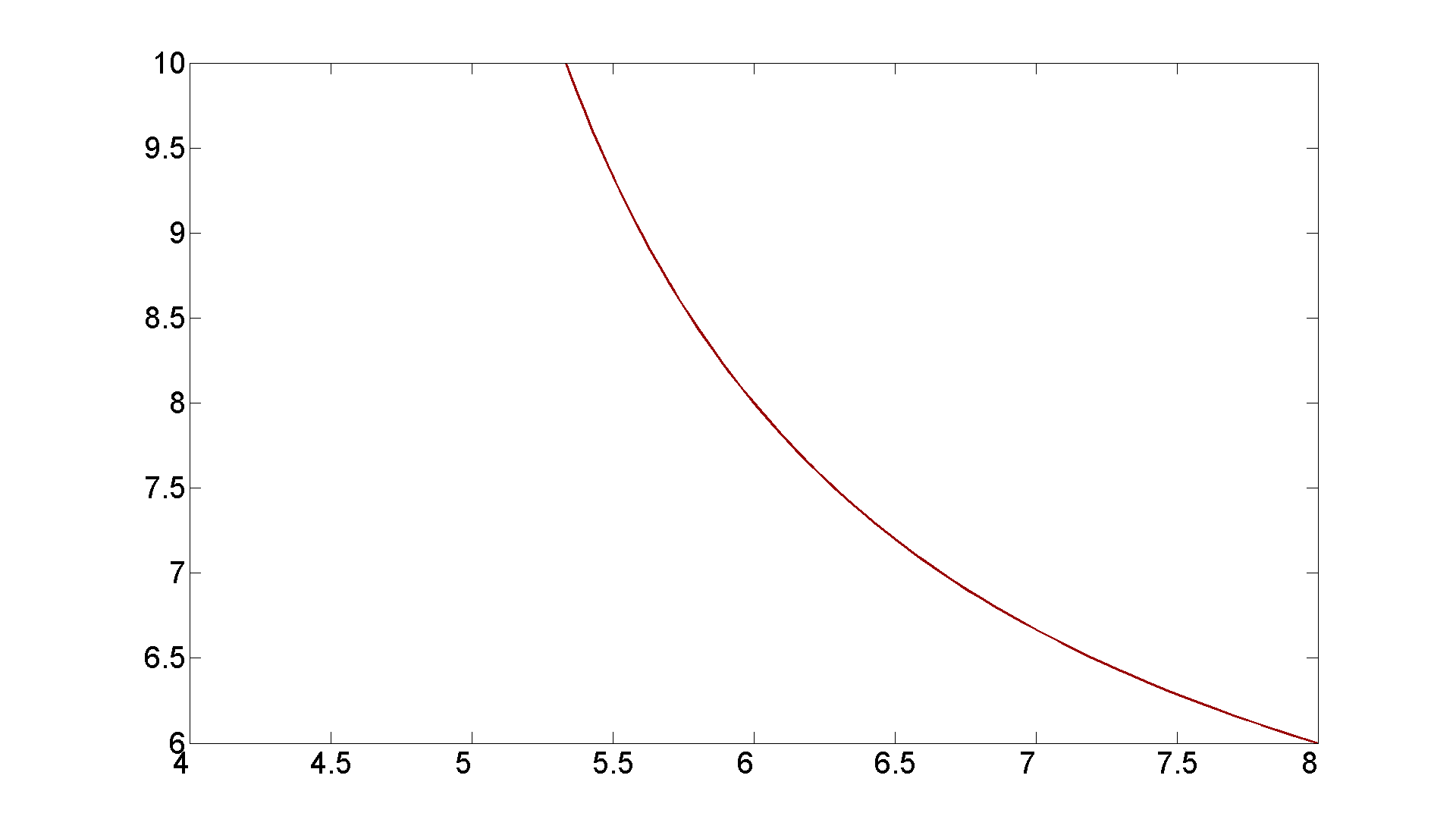
Also a little inspection reveals that x = 6, y = 8 is a point on the curve. So now we can draw it.
figure; set(gcf, 'Position', [1 1 1920 1420]) [X, Y] = meshgrid(4:0.1:8, 6:0.1:10); contour(X, Y, (1./2).*X.*Y - (X + Y + sqrt(X.^2 + Y.^2)), [0 0],... 'LineWidth',2,'Color',[.6 0 0]) set(gca,'XTickLabel',get(gca, 'XTickLabel'),'FontSize',25) % See p. 28 in the HOLR book for an explanation of the % option [0 0] in the contour command.
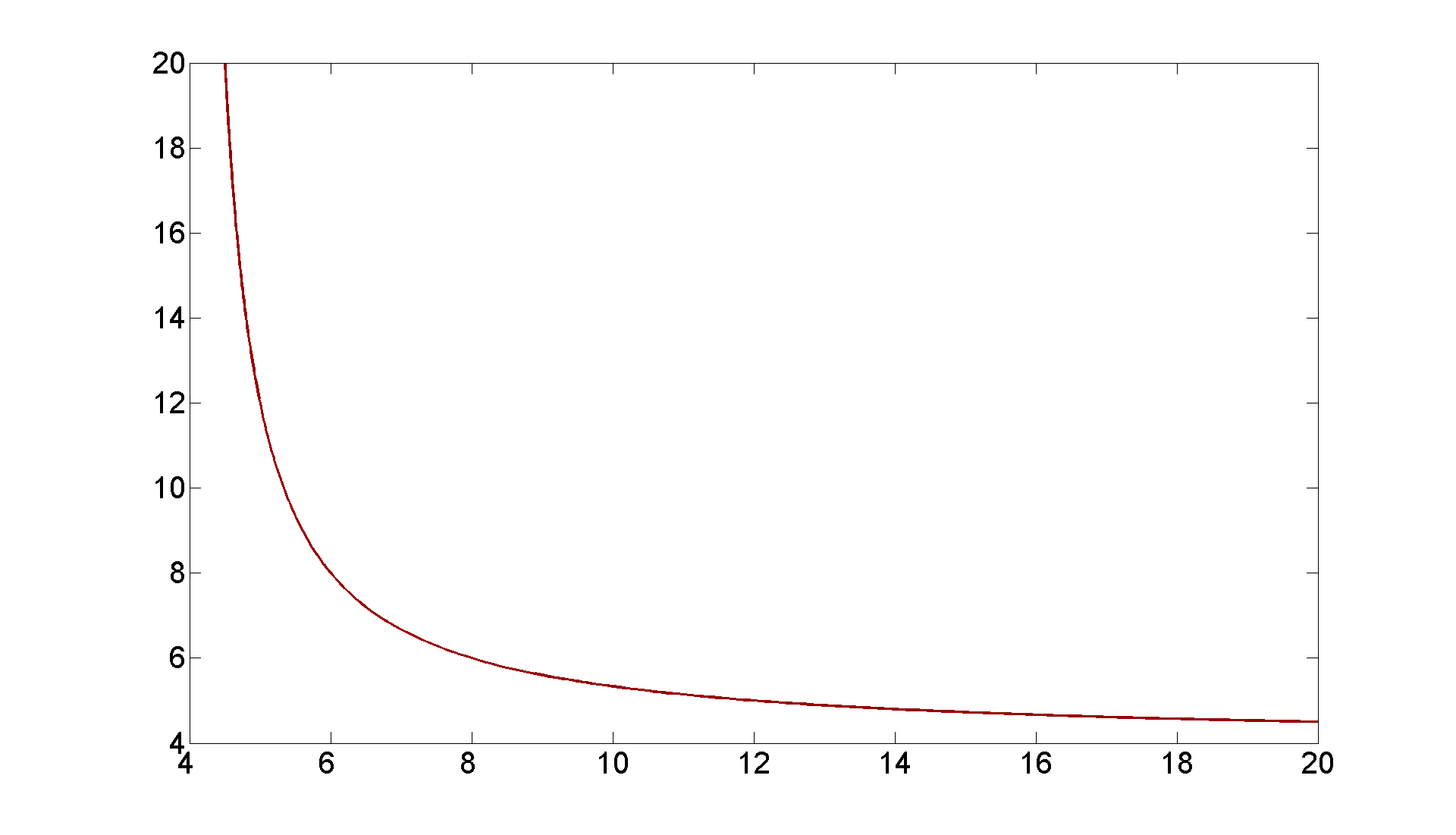
It's a very nice exercise to show algebraically that x = 4 is an asymptote of the hyperbola. It should be clear then that y = 4 is the other asymptote. Here is visual evidence:
figure; set(gcf, 'Position', [1 1 1920 1420]) [X, Y] = meshgrid(4:0.1:20, 4:0.1:20); contour(X, Y, (1./2).*X.*Y - (X + Y + sqrt(X.^2 + Y.^2)), [0 0],... 'LineWidth',2,'Color',[.6 0 0]) set(gca,'XTickLabel',get(gca, 'XTickLabel'),'FontSize',25)
Another nice exercise is to show that the only isosceles triangle which has equal perimeter and area corresponds to x = 4 + sqrt(8).
% Here is how to do it: [a,b]=solve([x-y,expr]) % Why is only one answer legit?
a = 2*2^(1/2) + 4 4 - 2*2^(1/2) b = 2*2^(1/2) + 4 4 - 2*2^(1/2)
Now for the second example.
% We consider the functions on [-pi, pi] that are Riemann % integrable. You will have to look back at your calculus % book if you don't remember upper sums and lower sums, etc. % Certainly all continuous functions are % integrable, but there are others, like % f(x) = 1/sqrt(|x|). clear all close all syms x figure; set(gcf, 'Position', [1 1 1920 1420]) ezplot(1/sqrt(x), [0 1]) set(get(gca, 'Title'),'Fontsize', 25) set(gca,'XTickLabel',get(gca, 'XTickLabel'),'FontSize',25)
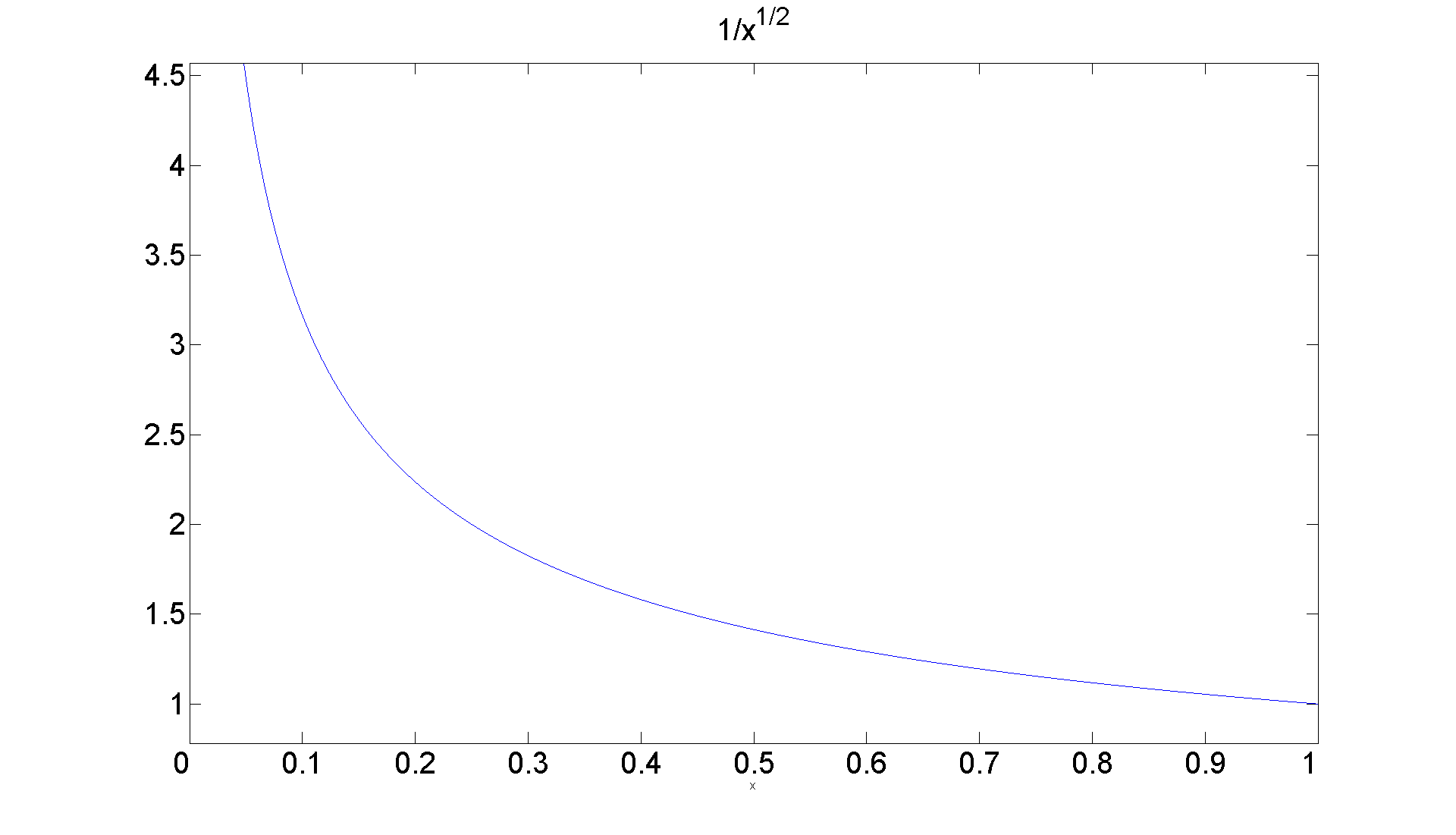
Clearly the y-axis is a vertical asymptote for the curve; Still, there is a finite area under the curve:
int(1/sqrt(x), 0, pi)
ans = 2*pi^(1/2)
Now for the transform. To every such function we associate or transform it to a sequence of complex numbers via the following formula:
% a_n = (1/2*pi)int_-pi^pi(e^(-i n t) f(t) dt, -inf < n < inf % This transform is bound up with the theory of % Fourier Series that you will certainly meet in later Math, % Physics or Engineering courses. There are many interesting % properties that relate the function f(t) to the % sequence {a_n}, which comprises in fact the % Fourier Coefficients of f. % The associated Fourier Series is nothing more than % sum_{-inf}^{inf} a_n e^{i n t}. % We can use this observation and the transform to solve the % following problem. Which functions are square integrable? % That is, when is it true that % int_-pi^pi |f(t)|^2 dt < inf. % It's not true always as you can see from the example % f(t) = 1/sqrt(|t|). int(1/x, 0, pi)
ans = Inf
We compute as follows _ int-pi^pi f(t)^2 dt = int_-pi^pi f(t)f(t) dt ________
%= int_-pi^pi [sum_{-inf}^{inf} a_n e^{i n t} sum_{-inf}^{inf} a_m e^{i m t}dt % % But (1/2pi)*int_-pi^pi e^{i j t}dt =0 unless j = 0, % in which case it is 1. % % So the above reduces to % % sum_{-inf}^{inf} |a_n|^2. % This solves the problem. An integrable function is % square integrable precisely when its Fourier coefficients % comprise a square summable sequence.
The Laplace Transform
Finally we look at the collection of functions that we have identified for which we can take a Laplace Transform, namely:
% The set of piecewise continuous functions on the positive % x-axis with no more than exponential growth. % The Laplace Transform of such a function f(t) is then % defined as % L{f}(s) = F(s) = int_0^inf e^{-st} f(t) dt. % The improper integral converges because of the assumptions % on the growth of f. F(s) is a continuous function that % decays to zero as s -> inf. The key property of the % Laplace Transform that makes it useful in the study % of differential equations is that it converts the operation % of differentiation into mutiplication by the Laplace % Transform variable; thus analytic problems in differential % equations are converted into algebraic problems. The % formulaic expression of the conversion is % computed in the text as: % L{f'}(s) = s L(f}(s) - f(0) % L{f''}(s) = s^2 L{f}(s) - s f(0) - f'(0), % perfect for initial value problems; and especially suited % to problems involving discontinuous functions for which % Laplace transforms can be computed.
A nice scheme for using Matlab to implement solutions via the Laplace Transform is presented in DEwM. Let's use it to solve the following explicit problem:
% y''(t) + 2 y'(t) - 2 y(t) = g(t) + delta_2(t), % y(0) = 1, y'(0) = -1, % where delta_2 is the Dirac generalized function % concentrated at t = 2, and g(t) is given as follows: % g(t) = 0, t < 0; t^2, 0<= t <1; 2, 1 <= t. % Note that g is discontinuous at t = 1, but the full right side % of the equation will also be discontinuous at t = 2, because % of the Dirac delta function concentrated there. clear all close all
Here is the scheme presented in DEwM:
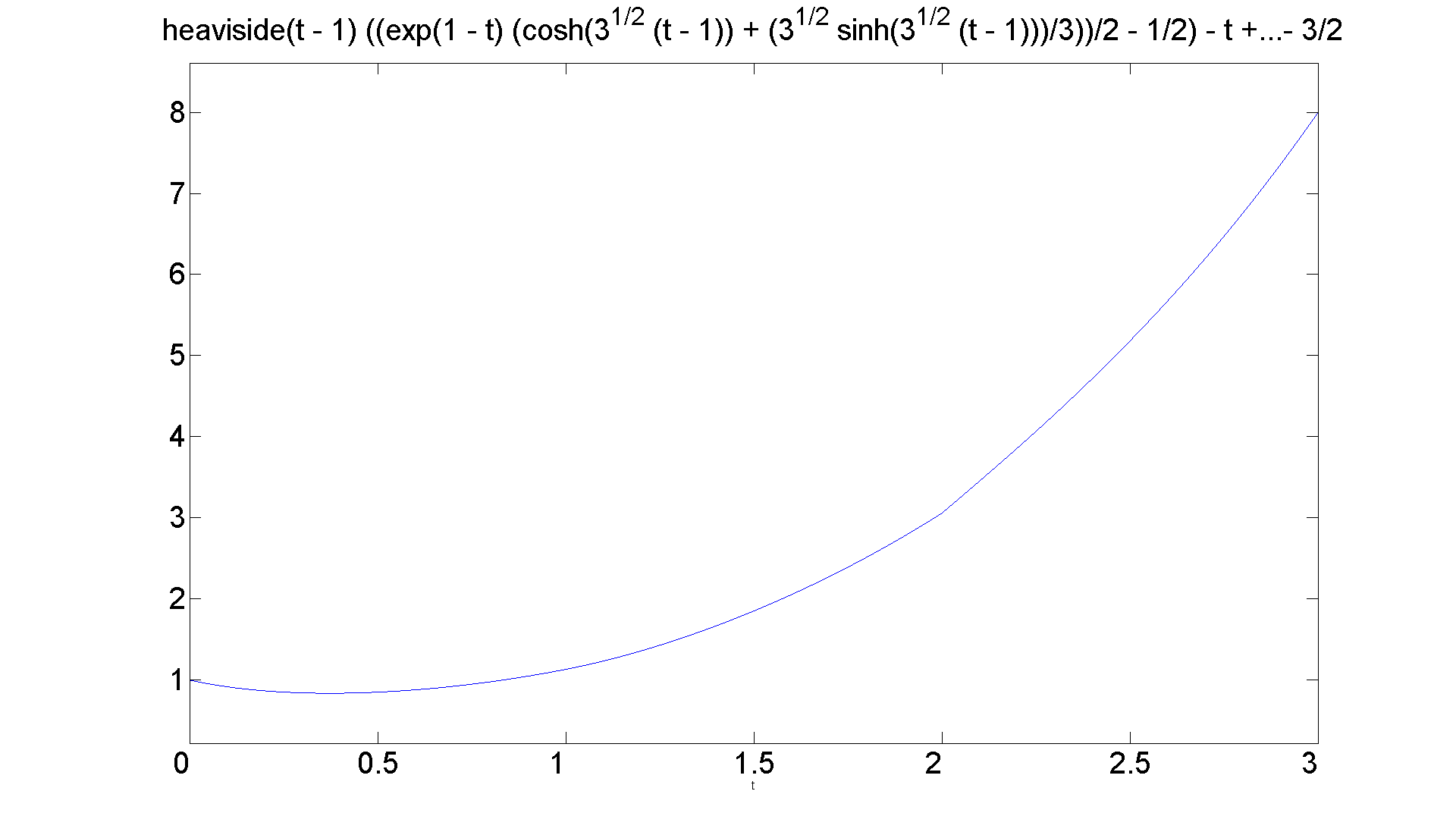
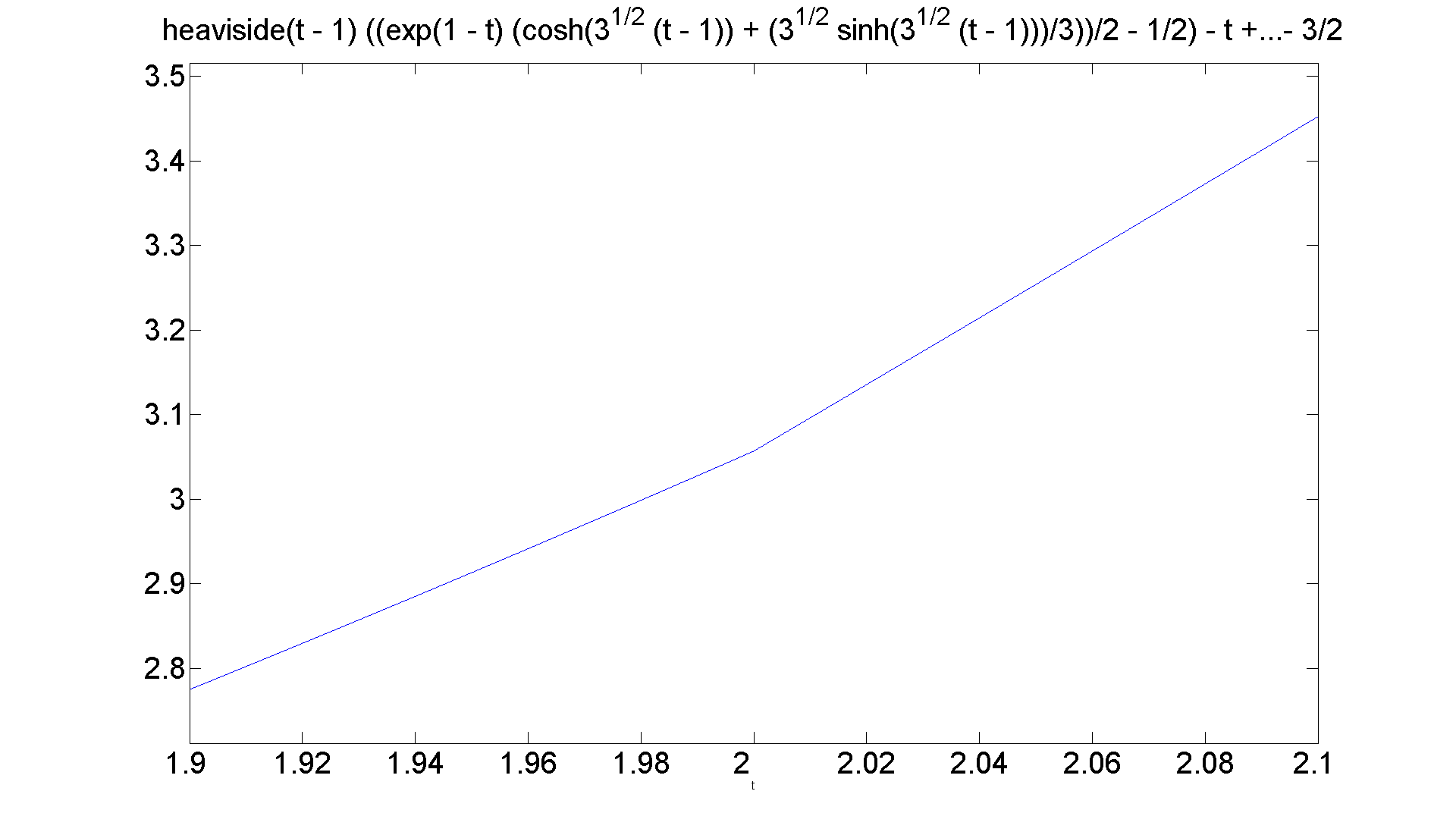
syms s t Y g = ['heaviside(t)*t^2 + heaviside(t - 1)*(2 - t^2)']; rhs = strcat(g,'+ dirac(t-2)'); eqn = sym(['D(D(y))(t) + 2*D(y)(t) - 2*y(t) = ' rhs]); lteqn = laplace(eqn, t, s); neweqn = subs(lteqn, {'laplace(y(t),t,s)', 'y(0)', 'D(y)(0)'}, {Y,1,-1}); ytrans = simplify(solve(neweqn,Y)); y = ilaplace(ytrans, s, t) figure; set(gcf, 'Position', [1 1 1920 1420]) ezplot(y, [0 3]) set(get(gca, 'Title'),'Fontsize', 25) set(gca,'XTickLabel',get(gca, 'XTickLabel'),'FontSize',25) % Mention that the "simplify" command is missing in the book. % Please use it when employing this template for solving eqns % by the Laplace transform with Matlab. % The graph illustrates a point made in DEwM. The solution % function will be differentiable at t = 1, but only % continuous at t = 2. That might be a little hard to see % from the graph, so
y = heaviside(t - 1)*((exp(1 - t)*(cosh(3^(1/2)*(t - 1)) + (3^(1/2)*sinh(3^(1/2)*(t - 1)))/3))/2 - 1/2) - t + 2*heaviside(t - 1)*(t/2 - (3*exp(1 - t)*(cosh(3^(1/2)*(t - 1)) + (5*3^(1/2)*sinh(3^(1/2)*(t - 1)))/9))/4 + (t - 1)^2/4 + 1/4) - t^2/2 + 2*heaviside(t - 1)*(t/2 - (exp(1 - t)*(cosh(3^(1/2)*(t - 1)) + (2*3^(1/2)*sinh(3^(1/2)*(t - 1)))/3))/2) + (cosh(3^(1/2)*t) - (3^(1/2)*sinh(3^(1/2)*t))/3)/exp(t) + (3*(cosh(3^(1/2)*t) + (5*3^(1/2)*sinh(3^(1/2)*t))/9))/(2*exp(t)) + (3^(1/2)*sinh(3^(1/2)*t))/(3*exp(t)) + (3^(1/2)*sinh(3^(1/2)*(t - 2))*heaviside(t - 2)*exp(2 - t))/3 - 3/2
figure; set(gcf, 'Position', [1 1 1920 1420]) ezplot(y, [1.9 2.1]) set(get(gca, 'Title'),'Fontsize', 25) set(gca,'XTickLabel',get(gca, 'XTickLabel'),'FontSize',25)
Finally, the formula for the solution has been computed, although not displayed. Let's take a look.
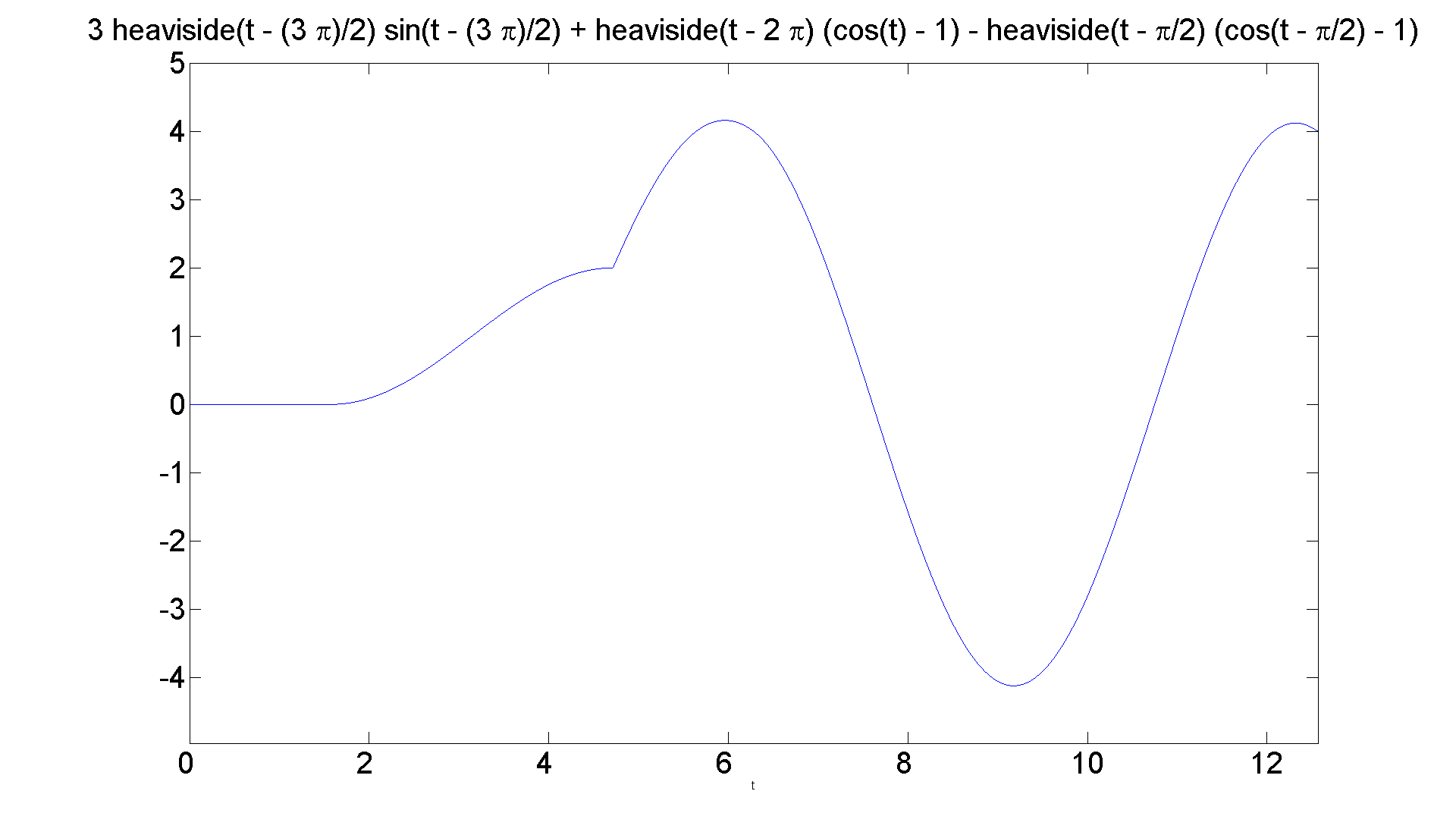
Another example: B&DiP, p. 343, #9. y''(t) + y(t) = u_pi/2(t) + 3*delta_3*pi/2(t) - u_2*pi(t), y(0) = 0, y'(0) = 0.
syms s t Y g = ['heaviside(t-pi/2) - heaviside(t - 2*pi)']; rhs = strcat(g,'+ 3*dirac(t-3*pi/2)'); eqn = sym(['D(D(y))(t) + y(t) = ' rhs]); lteqn = laplace(eqn, t, s); neweqn = subs(lteqn, {'laplace(y(t),t,s)', 'y(0)', 'D(y)(0)'}, {Y,0,0}); ytrans = simplify(solve(neweqn,Y)); y = ilaplace(ytrans, s, t) figure; set(gcf, 'Position', [1 1 1920 1420]) ezplot(y, [0 4*pi]) set(get(gca, 'Title'),'Fontsize', 25) set(gca,'XTickLabel',get(gca, 'XTickLabel'),'FontSize',25) % Again, let's look at the solution formula.
y = 3*heaviside(t - (3*pi)/2)*sin(t - (3*pi)/2) + heaviside(t - 2*pi)*(cos(t) - 1) - heaviside(t - pi/2)*(cos(t - pi/2) - 1)